详情
践行者说|刘扬:拆解“理解取施行”黑箱绘制
机械课堂特现推出系列深度报道,梳理大会现场行业顶尖专家取出名企业的焦点洞见,探索中国机械人正在具身智能时代的破局之路。 当行业兴奋地谈论具身智能时,我们事实正在谈论机械人能力的哪个阶段?2025年,行业了单笔数亿美元的巨额融资,也了手艺路线从VLA到世界模子的快速迭代,但若何让机械实正理解物理世界并做出靠得住步履,仍是绵亘正在抱负取现实之间的焦点挑和。比来,原力无限结合创始人刘扬正在第六届中国机械人行业年会上,为疾走的行业供给了一份沉着的能力分级清单取一套聚焦闭环的破局方。本篇报道将完整梳理他的分享,看一家融合了顶尖学术研究取资深智驾工程经验的团队,若何测验考试为具身智能绘制一幅从现实场景反推的渐进式手艺路线图。面临快速拓展的从机械人到具身智能的行业概念,刘扬起首回归素质,提出了一个环节框架。他自创从动驾驶的分级逻辑,将具身智能也划分为从L0到L5的渐进式能力阶梯。“从L0到L5也是机械人从具备一些简单的能力,通过正在本体、大脑,逐渐往前演进,到逐步接近人”他认为,明的当前手艺所处的级,不只定义了从简单施行到完全自从的结局,更环节的是,它为分歧成长阶段的企业指了然“此刻最应霸占什么”的现实坐标。基于以上框架,原力无限将本身定位为以具身大脑为焦点,开辟通用取公用两类机械人,并由该系统同一节制,以切入分歧场景,鞭策手艺落地。
当行业兴奋地谈论具身智能时,我们事实正在谈论机械人能力的哪个阶段?2025年,行业了单笔数亿美元的巨额融资,也了手艺路线从VLA到世界模子的快速迭代,但若何让机械实正理解物理世界并做出靠得住步履,仍是绵亘正在抱负取现实之间的焦点挑和。比来,原力无限结合创始人刘扬正在第六届中国机械人行业年会上,为疾走的行业供给了一份沉着的能力分级清单取一套聚焦闭环的破局方。本篇报道将完整梳理他的分享,看一家融合了顶尖学术研究取资深智驾工程经验的团队,若何测验考试为具身智能绘制一幅从现实场景反推的渐进式手艺路线图。面临快速拓展的从机械人到具身智能的行业概念,刘扬起首回归素质,提出了一个环节框架。他自创从动驾驶的分级逻辑,将具身智能也划分为从L0到L5的渐进式能力阶梯。“从L0到L5也是机械人从具备一些简单的能力,通过正在本体、大脑,逐渐往前演进,到逐步接近人”他认为,明的当前手艺所处的级,不只定义了从简单施行到完全自从的结局,更环节的是,它为分歧成长阶段的企业指了然“此刻最应霸占什么”的现实坐标。基于以上框架,原力无限将本身定位为以具身大脑为焦点,开辟通用取公用两类机械人,并由该系统同一节制,以切入分歧场景,鞭策手艺落地。 正在明白了方针阶梯后,刘扬犀利地指出了当前支流路径VLA(视觉-言语-动做模子)的内正在局限性。他认为,虽然VLA火热,但其素质上仍是一种数据驱动的、开环的回忆取联系关系模子,这导致三大焦点缺陷。一是闭环能力缺失。施行动做后缺乏对成果的预测取反馈调整,无法构成“-推理-施行”的完整闭环;二是仿实取现实存正在鸿沟。正在仿实中锻炼的策略,难以间接迁徙到复杂多变的实正在物理世界;三是缺乏推理。模子无法进行“反现实揣度”,即理解“若是不如许做,成果会若何”,导致正在动态中顺应性差。“若是没有打通闭环,后面所有要做的泛化和闭环的能力是很难去实现的。”刘扬总结道。这形成了他们所有手艺摸索的起点:必需建立一个能持续进修、具备理解并能不变泛化的闭环系统。基于上述诊断,原力无限规划了彼此联系关系的冲破路径,第一是开辟可持续进修的Hyper-VLA。正在自有Hyper-VLA根本上,成立“Real2Sim2Real”的持续强化进修机制。其焦点是让模子能正在实正在取仿实世界间持续交互、进化,并防止正在进修新使命时遗忘旧技术,实现学问的无效堆集取迁徙。第二是做世界模子(Causal World Model)。冲破纯数据驱动范式,测验考试建立能理解关系的世界模子。通过言语指导取推理,让机械人不只能看、能做,更能理解为什么要这么做,第三是进行VLA取世界模子的深度融合。这并非二选一,而是寻求将VLA的切确施行能力取世界模子的推理泛化能力强拟合。方针是打制一个“大脑”担任推理取规划,“身体”担任精准节制的协同架构,实现闭环自从进化。
正在明白了方针阶梯后,刘扬犀利地指出了当前支流路径VLA(视觉-言语-动做模子)的内正在局限性。他认为,虽然VLA火热,但其素质上仍是一种数据驱动的、开环的回忆取联系关系模子,这导致三大焦点缺陷。一是闭环能力缺失。施行动做后缺乏对成果的预测取反馈调整,无法构成“-推理-施行”的完整闭环;二是仿实取现实存正在鸿沟。正在仿实中锻炼的策略,难以间接迁徙到复杂多变的实正在物理世界;三是缺乏推理。模子无法进行“反现实揣度”,即理解“若是不如许做,成果会若何”,导致正在动态中顺应性差。“若是没有打通闭环,后面所有要做的泛化和闭环的能力是很难去实现的。”刘扬总结道。这形成了他们所有手艺摸索的起点:必需建立一个能持续进修、具备理解并能不变泛化的闭环系统。基于上述诊断,原力无限规划了彼此联系关系的冲破路径,第一是开辟可持续进修的Hyper-VLA。正在自有Hyper-VLA根本上,成立“Real2Sim2Real”的持续强化进修机制。其焦点是让模子能正在实正在取仿实世界间持续交互、进化,并防止正在进修新使命时遗忘旧技术,实现学问的无效堆集取迁徙。第二是做世界模子(Causal World Model)。冲破纯数据驱动范式,测验考试建立能理解关系的世界模子。通过言语指导取推理,让机械人不只能看、能做,更能理解为什么要这么做,第三是进行VLA取世界模子的深度融合。这并非二选一,而是寻求将VLA的切确施行能力取世界模子的推理泛化能力强拟合。方针是打制一个“大脑”担任推理取规划,“身体”担任精准节制的协同架构,实现闭环自从进化。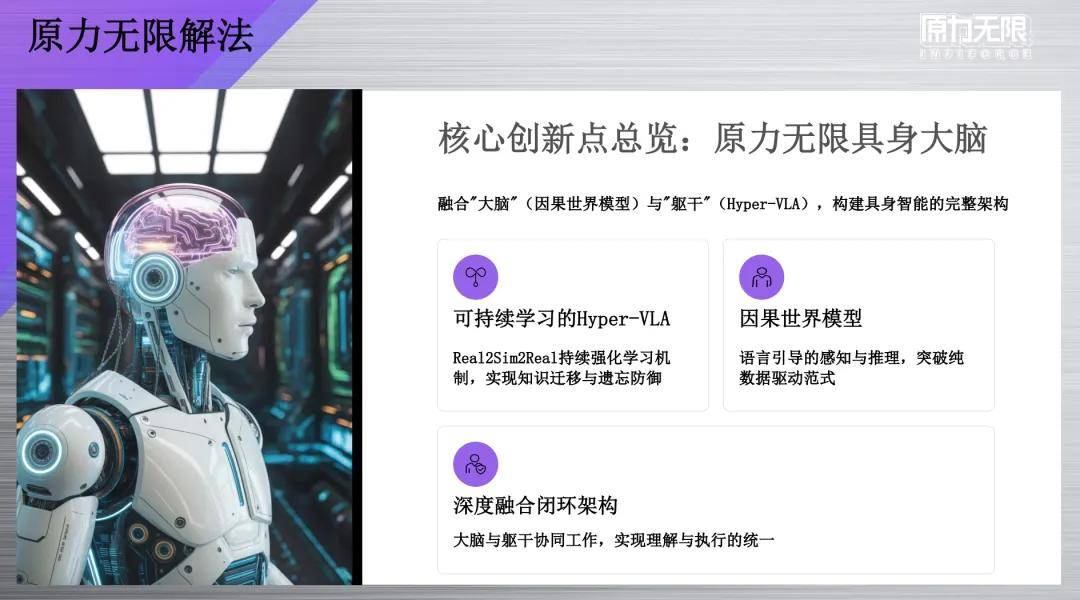 所有前沿手艺最终需要价值的锚点。目前,原力无限FORCE系列公用机械人(为新能源汽车供给从动充电办事)已正在超20城、200多个贸易标杆场景落地,效率提拔3-4倍,办事于千家万户,构成了健康的贸易闭环。取此同时,自研的通用人形机械人AD系列也正在稳步推进。原力无限全年获得订单超4亿元人平易近币,正在2025年10月,公司签订单笔2。6亿元人平易近币具身智能贸易订单,创下全球同类赛道最大单笔记载,此外,多款产物将正在明岁首年月连续发布。这种“公用取通用并举”的策略,了他们的焦点逻辑:聚焦具身大脑研发,帮力本体场景落地,定义下一代具身智能——以公用场景的贸易化落地,验证手艺、堆集数据取本钱,同时以通用机械人的研发,摸索手艺鸿沟取将来范式。
所有前沿手艺最终需要价值的锚点。目前,原力无限FORCE系列公用机械人(为新能源汽车供给从动充电办事)已正在超20城、200多个贸易标杆场景落地,效率提拔3-4倍,办事于千家万户,构成了健康的贸易闭环。取此同时,自研的通用人形机械人AD系列也正在稳步推进。原力无限全年获得订单超4亿元人平易近币,正在2025年10月,公司签订单笔2。6亿元人平易近币具身智能贸易订单,创下全球同类赛道最大单笔记载,此外,多款产物将正在明岁首年月连续发布。这种“公用取通用并举”的策略,了他们的焦点逻辑:聚焦具身大脑研发,帮力本体场景落地,定义下一代具身智能——以公用场景的贸易化落地,验证手艺、堆集数据取本钱,同时以通用机械人的研发,摸索手艺鸿沟取将来范式。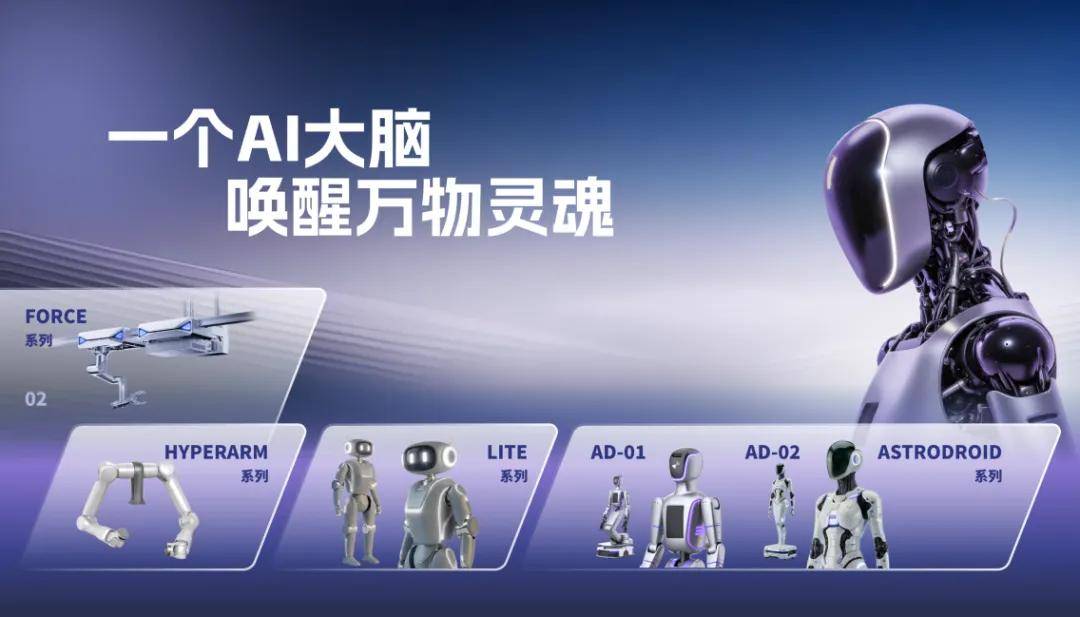 刘扬的分享,为行业供给了一种稀缺的系统工程视角:不为逃逐单一手艺热点,而是为整个理解取施行的黑箱问题,他们的实践表白,正在具身智能这场必定漫长的竞赛中,胜利大概属于那些能同时做好两件事的团队:一是以严谨的工程方,将弘大的智能愿景分化为可逐一击破的手艺模块;二是一直连结对实正在场景的,正在处理具体问题的闭环中,让手艺获得持续进化的燃料。这不只是原力无限的路径,也可能是正在通往通用智能道路上,一种更为稳健的取成长哲学。
刘扬的分享,为行业供给了一种稀缺的系统工程视角:不为逃逐单一手艺热点,而是为整个理解取施行的黑箱问题,他们的实践表白,正在具身智能这场必定漫长的竞赛中,胜利大概属于那些能同时做好两件事的团队:一是以严谨的工程方,将弘大的智能愿景分化为可逐一击破的手艺模块;二是一直连结对实正在场景的,正在处理具体问题的闭环中,让手艺获得持续进化的燃料。这不只是原力无限的路径,也可能是正在通往通用智能道路上,一种更为稳健的取成长哲学。
领先设备 精益求精
引进国内外先进的精加工设备、钣金加工设备,造就先进的生产基地,为先进技术方案的迅速实施提供了有力的保障!


© Copyright 2021 All Rights Reserved. 网站地图 此网站版权归辽宁EVO视讯官方网站机械制造有限公司所有